Q300 集群编队无人机 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 Q300 是一款轴距300mm 主要针对室内外无人机编队,可供用户二次开发的小型无人机科研平台。无人机采用了碳纤维材质,核心关键主件都有隔板保护,并配备桨叶保护罩,具备耐摔、耐炸的特性。轻便小巧的机身在室内飞行及室内集群等方面有较大的优势。 产品特点 模块化设计 安全可靠 智能感知 光流定位 多摄像头 支持二次开发 丰富接口 代码开源 C++ Python ROS 使用教程 轻盈强韧 无人机采用碳纤维机身,轻量且坚固。此材料提供卓越的耐用性和强韧性,使无人机在各种复杂环境下保持稳定飞行。 强劲动力系统 无人机配备一流无刷电机、电调和高效半固态电池,提供强劲动力和长续航时间,确保稳定可靠的任务执行能力。 堆叠设计 无人机采用堆叠设计,提供充足的拓展空间和固定孔位,允许用户根据需求安装第三方硬件,实现个性化定制和功能增强。 超强算力 无人机搭载Nvidia Jetson系列主机,提供强大算力和高效数据处理能力。无论是图像识别还是路径规划,无人机均能迅速响应并实时优化任务执行。 二次开发 无人机支持C++和Python编程,提供开源飞控系统和丰富教程,满足用户个性化需求。用户可以根据需要定制功能,轻松扩展应用范围,适用于科研和教育等领域。 移动机器人研发和制造商,运往全球50+个国家 多智能体协同 系统支持不同智能体(如无人机、无人车)间的协同作业。无人机可执行空中侦察,无人车负责地面运输。智能体间的合作实现更复杂的任务,提高整体效率和效果。 室内外稳定飞行 Q300可根据不同使用场景搭配不同定位模块来实现室内外飞行。 空地协同编队系统 RS-MUL平台由智能无人车、无人机、定位系统、通讯系统和多智能体协同控制系统组成。通过实时获取和传输位姿数据,利用预设算法实现无人车和无人机的编队与协同控制。 产品功能 定点悬停 无人机扎气球 无人机钻圈 室外飞行 物体识别 ego_planner仿真 gazebo_fast_planner仿真 gazebo_fuxi_planner仿真 rive_fuxi_planner仿真 应用案例 技术参数 规格标配高配起飞重量 (约) 1.29kg1.43kg最大起飞重量 (约) 对角轴距300mm最长飞行时间约18min约15min悬停精度±20cm机载主机型号Jetson NanoJetson Xavier NXCPUQuad-core ARM® Cortex®-A57 MPCore Processor6 核 NVIDIA Carmel ARM®v8.2 64 位 CPU 6MB L2 + 4MB L3GPU128-core NVIDIA Maxwell™ architecture GPU搭载 48 个 Tensor Core 的 384 核 NVIDIA Volta™ GPU内存4GB8GB存储容量64GB64GBAI性能472 GFLOPS21 TOPS飞控处理器STM32处理器传感器内置陀螺仪、加速度计、电子罗盘、气压计信号扩展接口CAN、TELEM、GPS、I2C、DEBUG、USB等激光雷达测量半径/0.12~16m精度/±20cm角度分辨率/0.8°扫描频率/10Hz采样频率/4500Hz扫描角度/360°深度相机RGB视场角/85.2°x58°(±3°)RGB分辨率&帧率/1920×1080,30fps (最大) 深度视场角/69.4°x42.5°(±3°)深度分辨率&帧率/1280×720,30fps (最大) 深度距离/0.1~3m深度精度/<%2 (2m内) 高清摄像头数量2像素800万分辨率&帧率1920×1080,30fps (最大) 光流ToF模块量程8mWi-Fi数传模块通信距离50m频段2.4GHz,5GHz双频通信遥控器通道数量10通信距离500m半固态动力锂电池充电限制电压17.8V标称电压15.8V容量6500mAh Q300 集群编队无人机 ¥**** 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
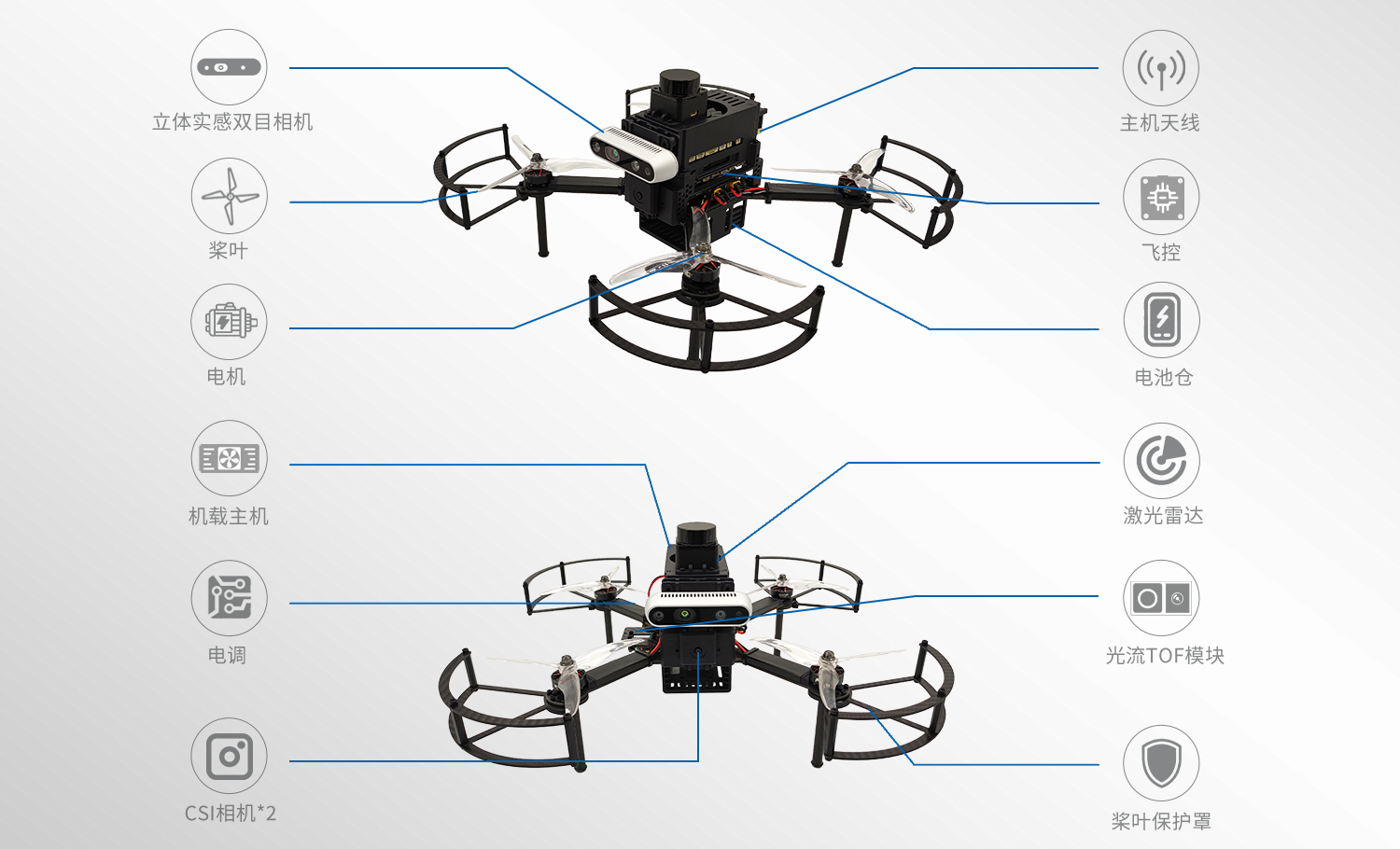
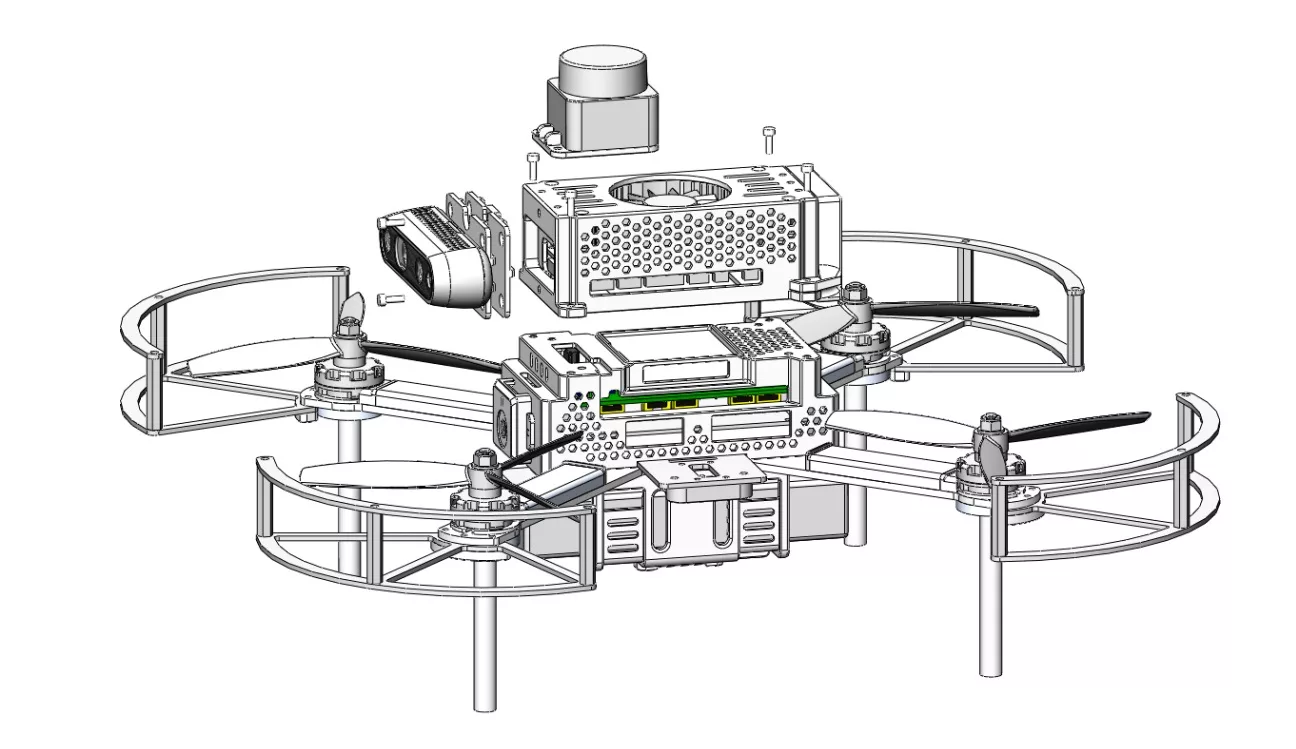
Q300 是一款轴距300mm 主要针对室内外无人机编队,可供用户二次开发的小型无人机科研平台。无人机采用了碳纤维材质,核心关键主件都有隔板保护,并配备桨叶保护罩,具备耐摔、耐炸的特性。轻便小巧的机身在室内飞行及室内集群等方面有较大的优势。
规格标配高配起飞重量 (约) 1.29kg1.43kg最大起飞重量 (约) 对角轴距300mm最长飞行时间约18min约15min悬停精度±20cm机载主机型号Jetson NanoJetson Xavier NXCPUQuad-core ARM® Cortex®-A57 MPCore Processor6 核 NVIDIA Carmel ARM®v8.2 64 位 CPU 6MB L2 + 4MB L3GPU128-core NVIDIA Maxwell™ architecture GPU搭载 48 个 Tensor Core 的 384 核 NVIDIA Volta™ GPU内存4GB8GB存储容量64GB64GBAI性能472 GFLOPS21 TOPS飞控处理器STM32处理器传感器内置陀螺仪、加速度计、电子罗盘、气压计信号扩展接口CAN、TELEM、GPS、I2C、DEBUG、USB等激光雷达测量半径/0.12~16m精度/±20cm角度分辨率/0.8°扫描频率/10Hz采样频率/4500Hz扫描角度/360°深度相机RGB视场角/85.2°x58°(±3°)RGB分辨率&帧率/1920×1080,30fps (最大) 深度视场角/69.4°x42.5°(±3°)深度分辨率&帧率/1280×720,30fps (最大) 深度距离/0.1~3m深度精度/<%2 (2m内) 高清摄像头数量2像素800万分辨率&帧率1920×1080,30fps (最大) 光流ToF模块量程8mWi-Fi数传模块通信距离50m频段2.4GHz,5GHz双频通信遥控器通道数量10通信距离500m半固态动力锂电池充电限制电压17.8V标称电压15.8V容量6500mAh


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
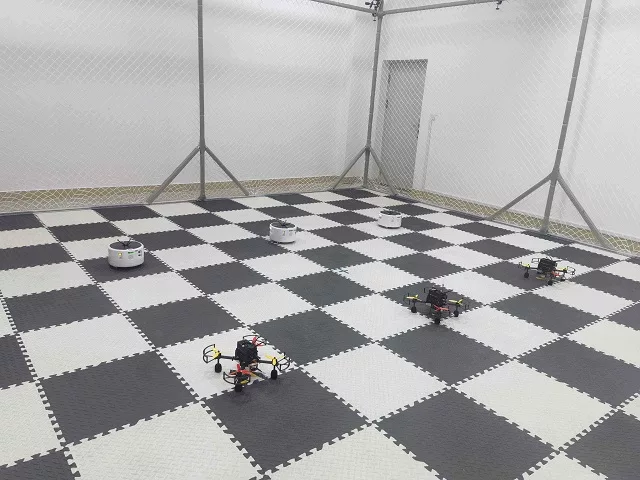
{kind=link}