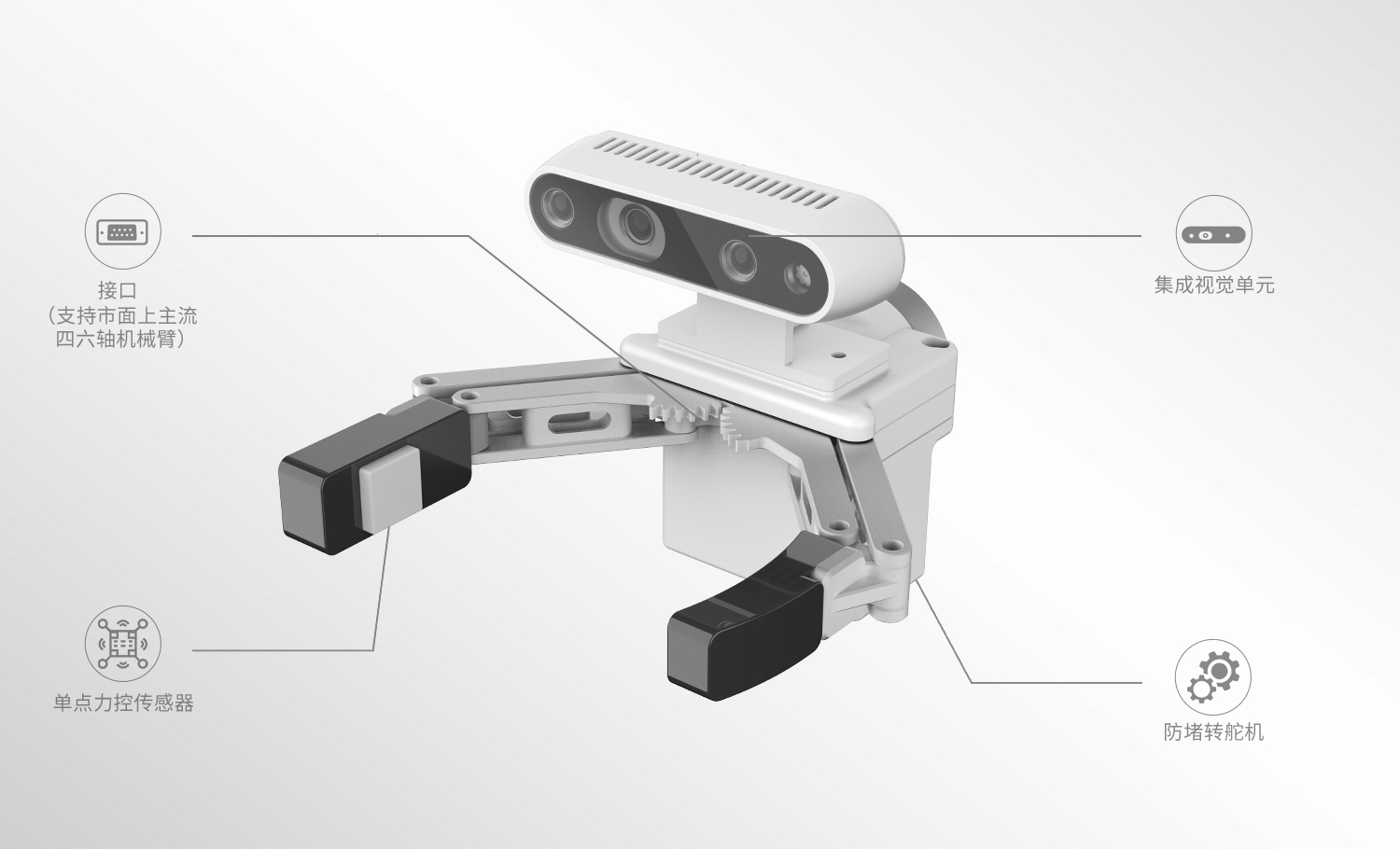
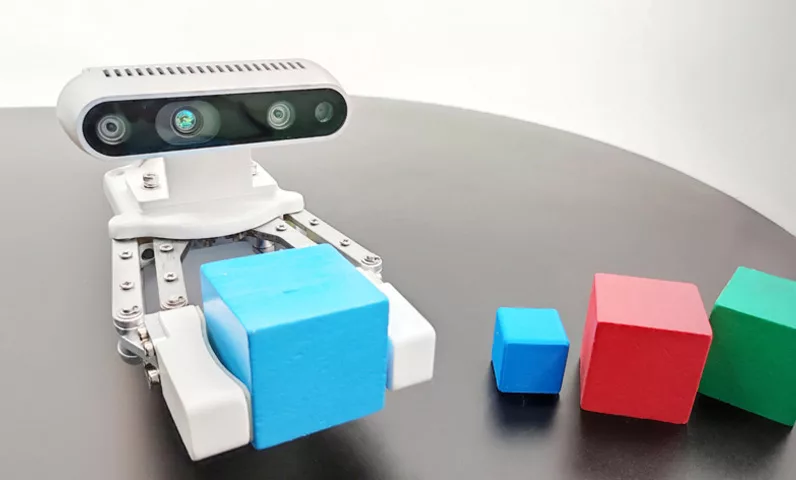
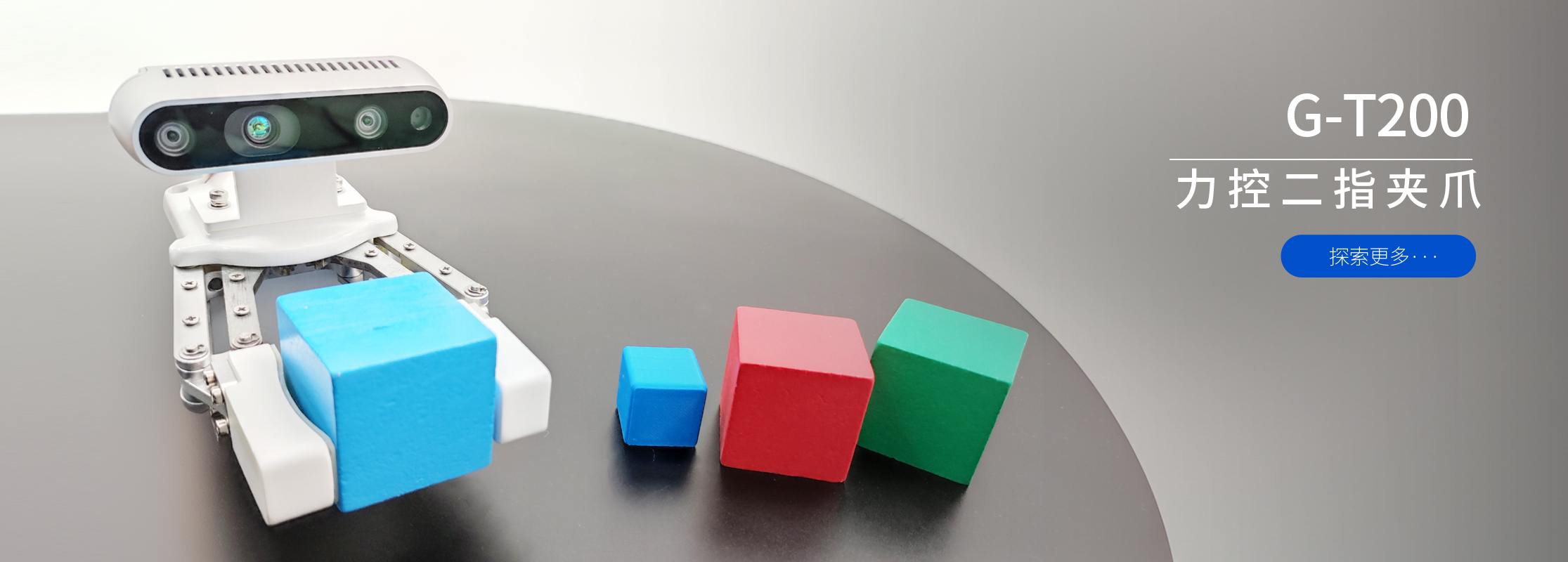
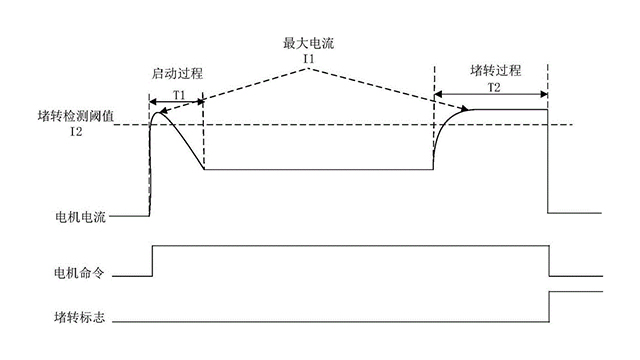
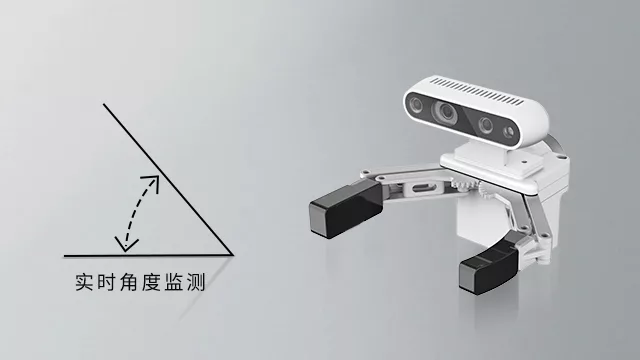
G-T200 力控二指夹爪 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 夹爪采用IO串口控制和驱控一体设计,便于与主流机械臂集成。支持视觉单元和AI智能抓取,配备力控传感器,适用力控抓取研究。 产品特点 支持机械臂 视觉抓取 性能强劲 代码开源 C++ Python ROS 使用教程 堵转保护 长期频繁的堵转会对机械爪的电机和传动机构造成磨损,缩短使用寿命并增加维护成本。堵转保护功能有效降低故障率,延长设备寿命,并防止被抓取物体受损。 实时角度监测 机械爪实时测量并反馈关节或末端执行器的角度变化,确保按预设轨迹精准操作。无论是精密装配、物料搬运还是其他精细任务,都能实现高作业质量。 二次开发 基于开源ROS开发,用户可自由访问和修改代码以实现个性化功能。ROS作为领先平台,提供广泛的资源支持,允许功能扩展、性能优化及第三方应用集成。 移动机器人研发和制造商,运往全球50+个国家 力反馈控制 机械爪可实时感知和模拟与目标物体的相互作用力,实现极致精准操作。可根据接触力自动调整力度,确保操作时既不损坏物体,也不会滑落,大幅提升操作精细度。 手眼协同 机械爪集成视觉识别与传感器技术,实现“手眼协同”。它依据预设程序执行动作,并实时捕捉分析物体的位置、形状、大小及材质,为精准抓取提供数据支持。 产品功能 物品抓取 机器视觉 应用案例 技术参数 规格参数电控机械夹爪尺寸135mmx72mmx55mm重量0.25kg抓取方式平行抓取关节速度90°/s(可调)夹持宽度0-100mm抓取精度<1mm工作电压(v)24V通信接口PWM IO控制抓取负载1kg手眼(深度立体相机)RGB视场角85.2°x58°(±3°)RGB分辨率&帧率1920×1080,30fps(最大)深度视场角69.4°x42.5°(±3°)深度分辨率&帧率1280×720,30fps(最大)深度距离0.1~3m深度精度<%2(2m内) G-T200 力控二指夹爪 ¥**** 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
规格参数电控机械夹爪尺寸135mmx72mmx55mm重量0.25kg抓取方式平行抓取关节速度90°/s(可调)夹持宽度0-100mm抓取精度<1mm工作电压(v)24V通信接口PWM IO控制抓取负载1kg手眼(深度立体相机)RGB视场角85.2°x58°(±3°)RGB分辨率&帧率1920×1080,30fps(最大)深度视场角69.4°x42.5°(±3°)深度分辨率&帧率1280×720,30fps(最大)深度距离0.1~3m深度精度<%2(2m内)

























{kind=link}
{kind=link}
{kind=link}
{kind=link}