










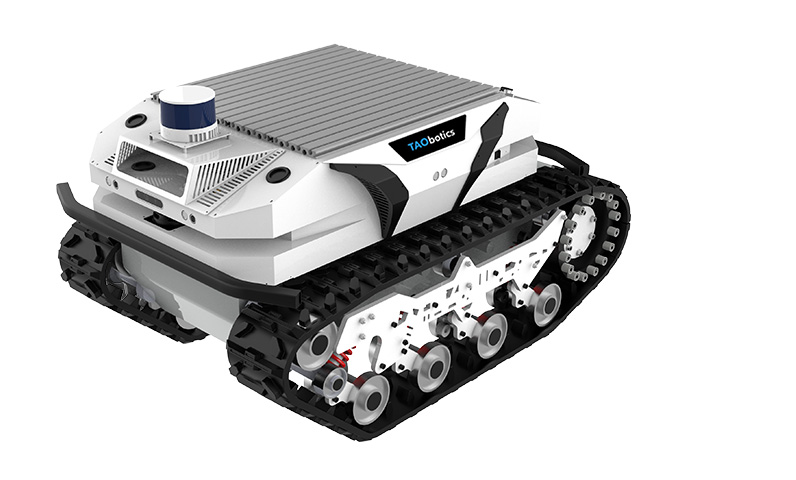










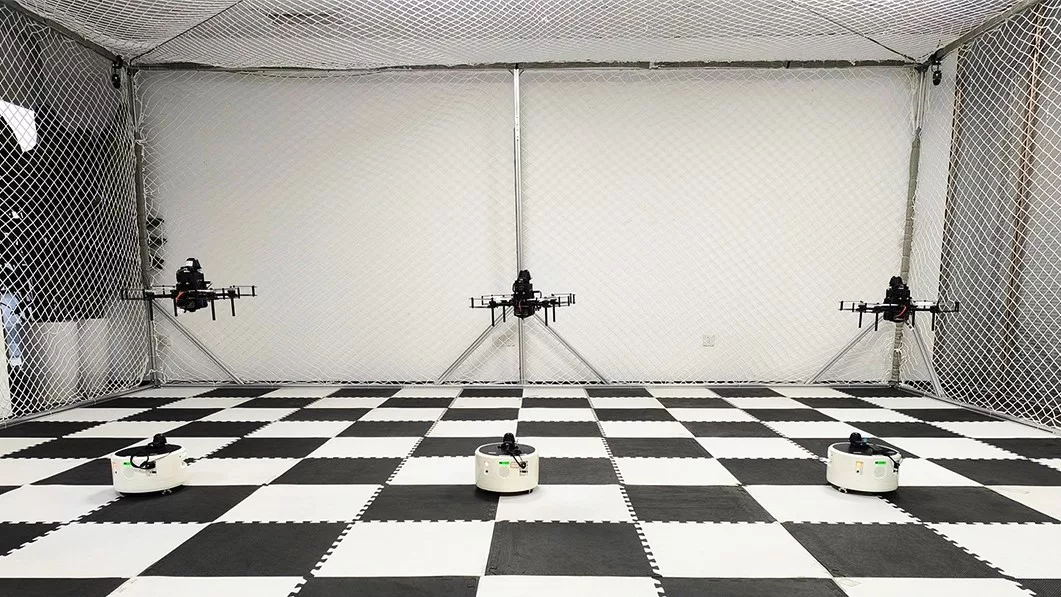
运动灵活
集群编队
支持机械臂
智能感知
多摄像头
激光雷达定位
丰富接口
代码开源
C++
Python
ROS
使用教程








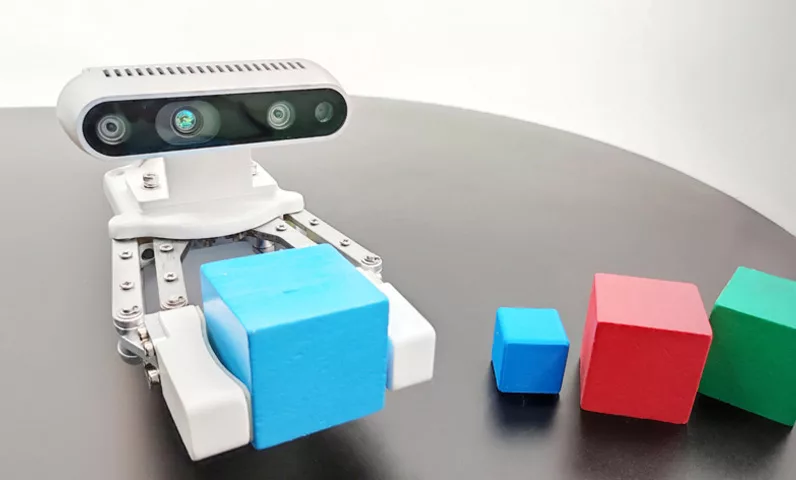
机器臂套件
复合机器人可扩展安装桌面六轴机械臂,工作半径280mm,末端负载250g,可装配机械爪。

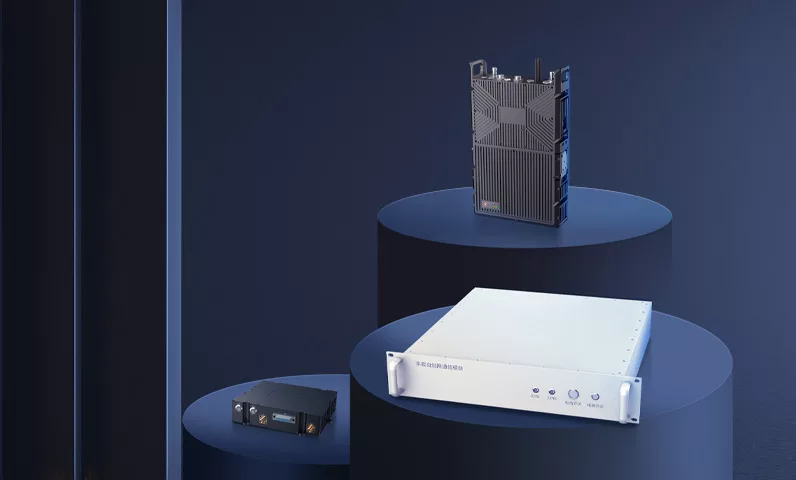
远程驾驶套件
复合机器人可扩展远程驾驶套件,通过4G/5G网络在危险环境中远程控制,利用深度学习处理图像数据,发现潜在问题,保障安全并有效处理任务。



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

