Octopus 智能全向麦克纳姆无人车 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 Octopus智能全向麦克纳姆无人车配备双激光雷达。集成移动底盘、里程计、激光雷达、立体视觉相机等,兼容Navigation、ROS TF、Pluginlib和TensorFlow,支持激光SLAM、定位导航和物体识别,适用于教学和科研。 产品特点 货物运载 支持机械臂 性能强劲 超长续航 自主导航 摄像头 激光雷达定位 二次开发 代码开源 C++ Python ROS 算力强悍 机载主机配备独立显卡,提供强大的算力。无论是复杂环境感知、实时决策还是大规模数据运算,都能快速高效地处理,确保每次操作都精准迅速。 传感器高度集成 配备雷达、深度相机、超声波等传感器,构建高效感知系统,提升导航精度,轻松应对复杂任务。还可基于这些传感器探索更多新应用场景。 预留丰富接口,便于二次开发 配备多种供电和通讯接口,满足不同需求,车身预留安装孔位,便于加装第三方设备,良好的灵活性和扩展性。确保任务中满足您的多样化要求。 移动机器人研发和制造商,运往全球50+个国家 全向运动 八麦克纳姆轮的全向底盘设计使机器人能够在任意方向上运动,无需复杂转向,轻松实现前进、后退、侧移和旋转,确保在狭小空间或复杂地形中高效作业。 超广视野 双激光雷达和6个毫米波雷达提供广角覆盖,实现对小车周围环境的全方位、无死角监测,确保精准感知、实时反馈,并大幅提升安全性。 智慧农业采摘机器人系统 智慧农业采摘机器人系统RS-AGR,以自然果园环境中机器人采摘果蔬为原型,综合运用嵌入式系统、移动机器人自主导航定位、机械臂规划、视觉识别、传感器与控制器、云计算等技术,依托智能无人车、多轴机器臂、机械夹爪、双目摄像头、激光雷达、深度摄像头、惯导系统、无线网络、智能网关等设备实现果蔬的无人化采摘。 5G 远程安防巡检机器人系统 5G安防巡检机器人系统RS-INS采用了一套多设备的耦合系统,从机构设计和优化、运动规划与控制、状态估计与环境感知等方面着手,通过5G网络实现4K高清回传、远程实时控制、多线路巡防、目标跟踪定位、白天+夜间双光源拍摄等功能,支持多路视频点播和视频回放,可实现在复杂地形下的例行巡视、云端远程作业,后台自动存档分析等功能。 产品功能 SLAM环境建图自主定位导航仿真实践机器学习 应用案例 技术参数 规格标配高配尺寸950mmx720mmx400mm越障能力25mm驱动方式八轮麦克纳姆轮驱动+主动轮独立悬挂重量80kg最大负载100kg最大速度1.3m/s最大爬坡角度10°最小转弯半径0m续航时间5-8小时待机时间8小时供电接口5V,12V,24V通讯接口USB通信接口3个,CAN通信接口1个,通信网口3个机载主机CPUIntel酷睿i9处理器内存16G硬盘512G显卡GTX1660S嵌入式控制单元主控芯片STM32 F4系列3D激光雷达线数/16测量半径0.05m-120m精度0.5cm角度分辨率水平:0.09°@5Hz,0.18°@10Hz,0.36°@20Hz; 垂直:2°;扫描频率5-20Hz采样频率320000Hz水平视场角360°垂直视场角30°(-15° ~ +15°)2D激光雷达数量2个测量半径0.1-40m精度±30mm角度分辨率0.23°@10Hz,0.34°@15Hz扫描频率7-15Hz采样频率16200Hz扫描角度0-360°深度相机RGB视场角71°x43.7°RGB分辨率&帧率1920*1080,30fps(最大)深度视场角67.9°x45.3°深度分辨率&帧率640×400,30fps(最大)深度距离0.3~3m深度精度±1-6mm (1米内)RTK刷新率/20Hz定位精度随差分云共享数据变化收敛时间随差分云共享数据变化支持的定位系统BDS/GPS/GLONASS/Galileo/QZSS4G网络模组最大传输速率150Mbps千兆网口数量4个频段双频超声波传感器数量6个量程2-450cm精度0.5cm频率20Hz屏幕分辨率1280×800尺寸10.1英寸触屏是扬声器数量1个碰撞检测带数量2条长度74cm功能按钮急停安全开关1个;交互功能按键2个,可自定义功能。 Octopus 智能全向麦克纳姆无人车 ¥**** 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
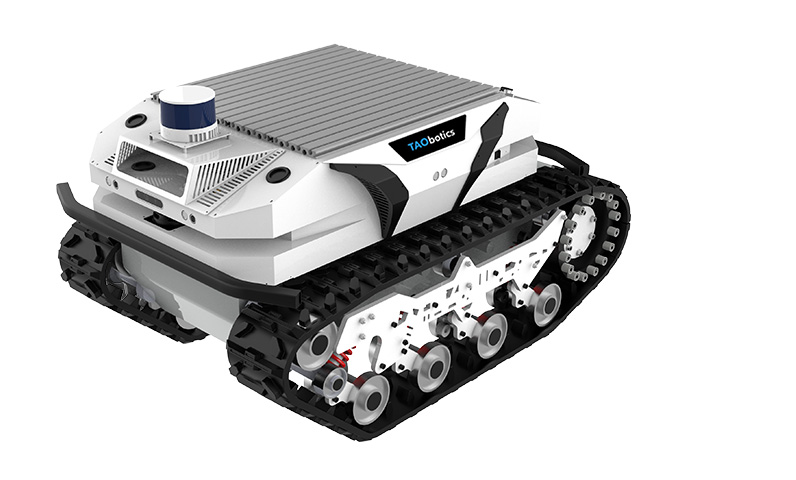
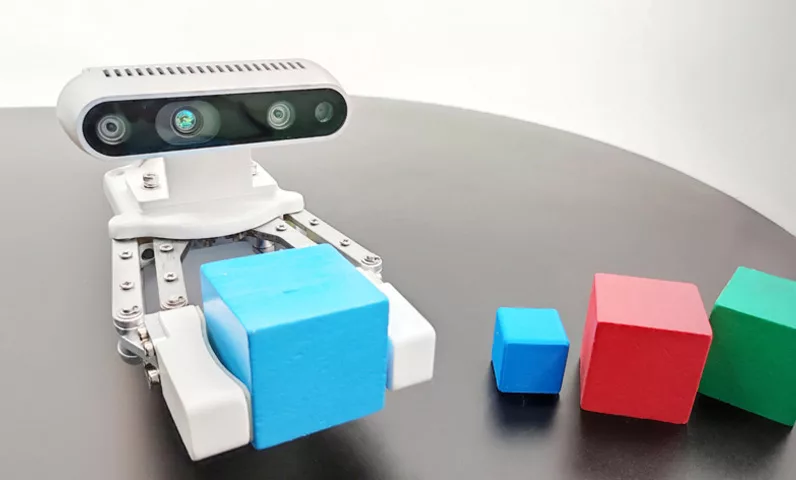
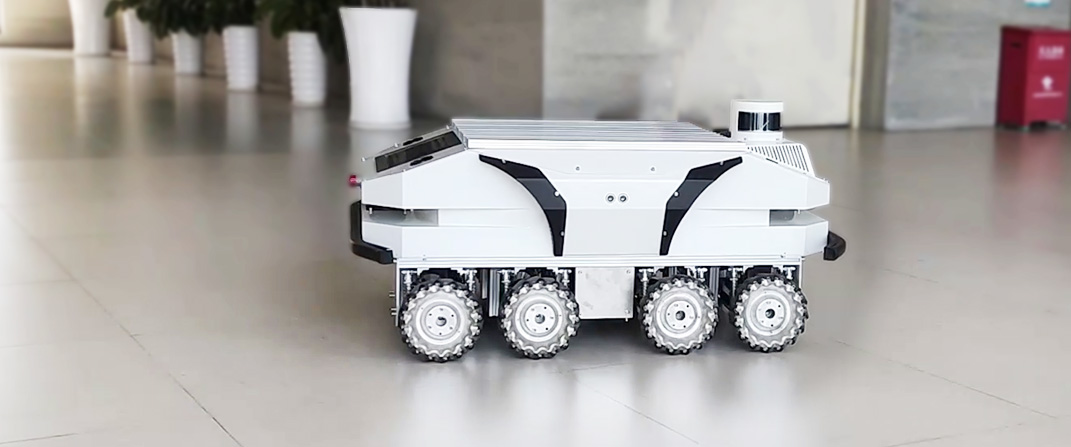
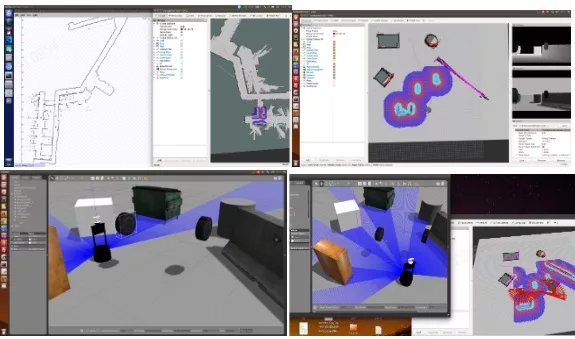
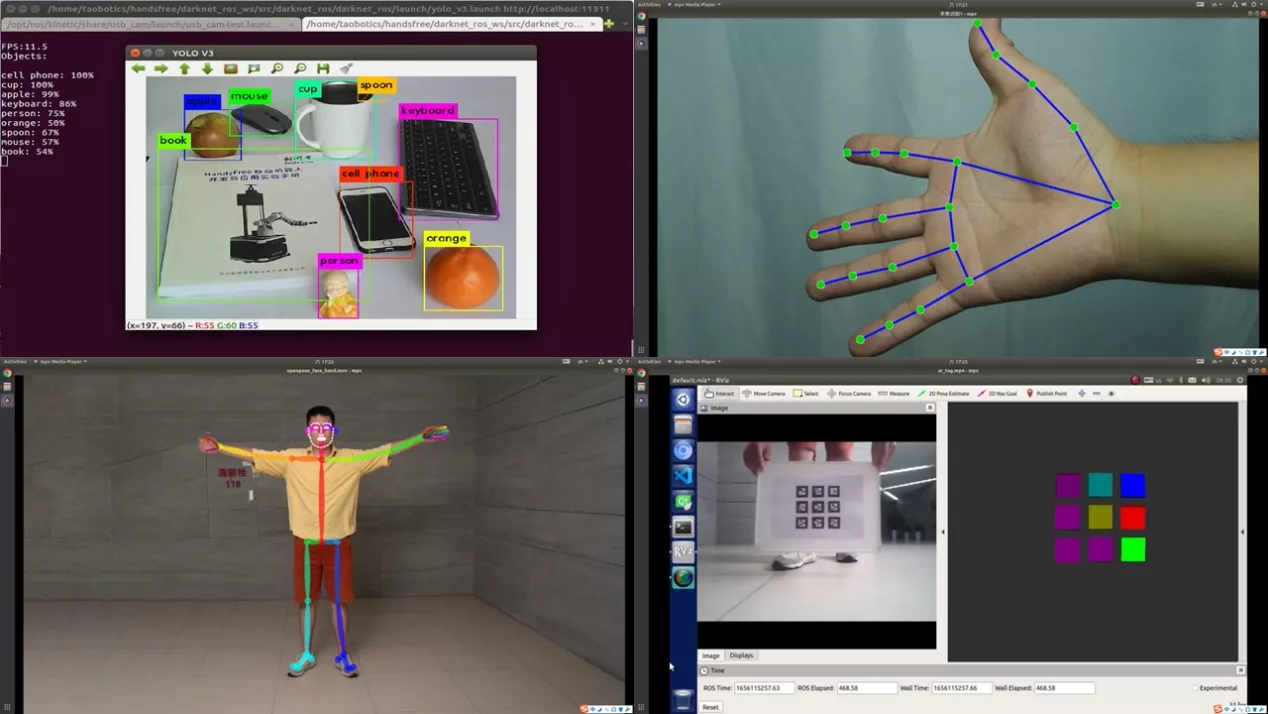
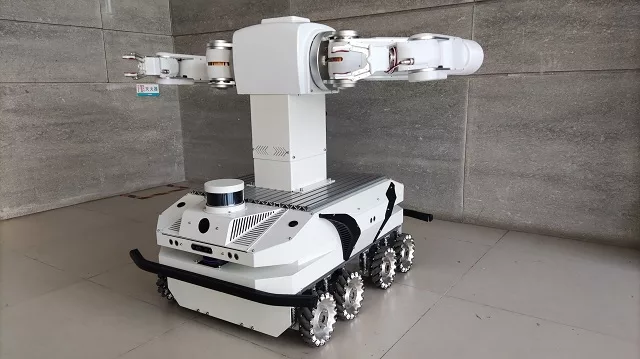
Octopus智能全向麦克纳姆无人车配备双激光雷达。集成移动底盘、里程计、激光雷达、立体视觉相机等,兼容Navigation、ROS TF、Pluginlib和TensorFlow,支持激光SLAM、定位导航和物体识别,适用于教学和科研。
智慧农业采摘机器人系统RS-AGR,以自然果园环境中机器人采摘果蔬为原型,综合运用嵌入式系统、移动机器人自主导航定位、机械臂规划、视觉识别、传感器与控制器、云计算等技术,依托智能无人车、多轴机器臂、机械夹爪、双目摄像头、激光雷达、深度摄像头、惯导系统、无线网络、智能网关等设备实现果蔬的无人化采摘。
5G安防巡检机器人系统RS-INS采用了一套多设备的耦合系统,从机构设计和优化、运动规划与控制、状态估计与环境感知等方面着手,通过5G网络实现4K高清回传、远程实时控制、多线路巡防、目标跟踪定位、白天+夜间双光源拍摄等功能,支持多路视频点播和视频回放,可实现在复杂地形下的例行巡视、云端远程作业,后台自动存档分析等功能。
规格标配高配尺寸950mmx720mmx400mm越障能力25mm驱动方式八轮麦克纳姆轮驱动+主动轮独立悬挂重量80kg最大负载100kg最大速度1.3m/s最大爬坡角度10°最小转弯半径0m续航时间5-8小时待机时间8小时供电接口5V,12V,24V通讯接口USB通信接口3个,CAN通信接口1个,通信网口3个机载主机CPUIntel酷睿i9处理器内存16G硬盘512G显卡GTX1660S嵌入式控制单元主控芯片STM32 F4系列3D激光雷达线数/16测量半径0.05m-120m精度0.5cm角度分辨率水平:0.09°@5Hz,0.18°@10Hz,0.36°@20Hz; 垂直:2°;扫描频率5-20Hz采样频率320000Hz水平视场角360°垂直视场角30°(-15° ~ +15°)2D激光雷达数量2个测量半径0.1-40m精度±30mm角度分辨率0.23°@10Hz,0.34°@15Hz扫描频率7-15Hz采样频率16200Hz扫描角度0-360°深度相机RGB视场角71°x43.7°RGB分辨率&帧率1920*1080,30fps(最大)深度视场角67.9°x45.3°深度分辨率&帧率640×400,30fps(最大)深度距离0.3~3m深度精度±1-6mm (1米内)RTK刷新率/20Hz定位精度随差分云共享数据变化收敛时间随差分云共享数据变化支持的定位系统BDS/GPS/GLONASS/Galileo/QZSS4G网络模组最大传输速率150Mbps千兆网口数量4个频段双频超声波传感器数量6个量程2-450cm精度0.5cm频率20Hz屏幕分辨率1280×800尺寸10.1英寸触屏是扬声器数量1个碰撞检测带数量2条长度74cm功能按钮急停安全开关1个;交互功能按键2个,可自定义功能。






























{kind=link}
{kind=link}

