GeoScan-360 3D手持建图仪 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 GeoScan-360 朝闻道机器人携手香港科技大学等知名学术机构专家团队,联合研发的高性能手持激光雷达,具备微秒级同步、厘米级高精度定位和多传感器融合技术。产品集成高精度3D雷达、高精度IMU、工业摄像头、RGBD摄像头及高性能计算平台,支持二次开发,并预装建图软件。其便携式设计和多镜头配置使其广泛适用于教育、科研及工业测绘等场景。 产品特点 多传感器融合 大场景 软件开源 支持预览 室内三维重建 微秒级数据同步 多场景 导出即用 高精度地图构建 3D出图 ROS 使用教程 多模态数据采集 支持彩色相机,深度相机、3D激光雷达,IMU,数据能实现实时多传感器高速数据输出,可作为集成式SLAM实验采集终端,可实现多种SLAM算法,助力研究人员快速搭建所需硬件实验平台。 工业微秒级数据同步 提供微秒级同步技术,可以实现激光雷达,摄像头、深度相机、imu等传感器数据的微秒级同步。每秒点云数量大于200万,测量距离40米,精度±1.2cm,水平视角360 °。 支持实时在线解算 支持在线解算,可以在扫描过程中实时进行SLAM解算,可通过触摸屏幕实时观测和控制点云数据。 适配大多数环境 工作温度范围广,适配绝大多数环境如森林,矿场,洞穴,建筑,隧道、建筑等场景 移动机器人研发和制造商,运往全球50+个国家 高精度地图构建 高精度地图构建;支持多种slam算法;可融合工业相机,深度相机、激光雷达等数据。 室内三维重建 高精度三维重建;融合相机,激光雷达数据。 模块化设计可跨平台搭载 可无缝衔接无人机、足式机器人、无人车等多种负载平台,跨平台作业,拓展无线应用可能。 多传感器融合技术 通过先进的校准技术,确保传感器的高精度和稳定性,并通过软件实现不确定性感知的大规模多会话LiDAR地图构建,支持精确的回环检测与校正,覆盖扫描面积可达50000平米。 高精度传感器校准技术 大规模点云数据处理 配套软件服务 支持多种开源SDK集成,完美契合高校和科研需求,兼容多平台部署与运行验证,支持多机器人操作系统。采用先进的传感器校准技术和融合策略,确保数据的准确性和一致性。 开源SDK 成熟的融合策略 高精度建图 视觉融合建图架构 激光雷达建图架构 精准回环修正技术 研发成果已发表期刊 朝闻道机器人携手香港科技大学等顶尖学术机构的专家团队,联合研发了GeoScan-360手持激光雷达。该产品的研发成果已在多篇国际知名期刊中发表,GeoScan-360结合了学术研究与实际应用的深度融合,具备卓越的精度与性能。 产品功能 手持雷达建图 车载雷达建图 应用案例 地下空间 林业勘察 工程建筑 矿业检测 隧道测量 古建筑测绘 技术参数 规格参数通用尺寸(长*宽*高)35cm*15cm*15cm电源输入12V-24V电池容量72Wh重量 (约) 2kg(含电池)续航时间(约) 2小时存储容量128G产品外壳航空铝供电方式弹夹电池/外部供电主控CPU参数核心数与线程数:4核4线程主频:0.8GHz睿频:最高可达3.4GHz缓存:6MB内存8G存储容量128G激光雷达激光等级Class1/905 nm测量距离0.1m~40m@10%反射率 ,0.1m~70m@80%反射率点云数量及频率200,000点/秒,10 Hz(典型值)视场角水平360°,竖直-7°~52°惯性测量单元ICM40609 -20℃至55℃防护级别IP67深度相机RGB视场角90°×65° RGB分辨率&帧率高达1280×800 30帧/秒深度视场角87°×58°深度分辨率&帧率高达1280×720 90帧/秒最小深度距离0.52米深度精度<2%位于4米工业摄像头数量2分辨率@帧率1280×960 最大@39fps输出像素宽度12bit有效像素120万像元尺寸3.75×3.75um动态范围64dB软件数据格式多种格式可选移动端实时数据解析 GeoScan-360 3D手持建图仪 ¥19800 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
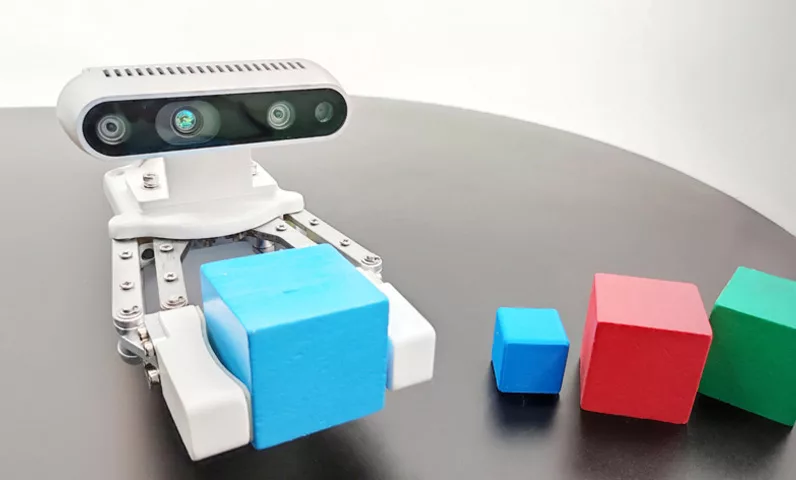
GeoScan-360 朝闻道机器人携手香港科技大学等知名学术机构专家团队,联合研发的高性能手持激光雷达,具备微秒级同步、厘米级高精度定位和多传感器融合技术。产品集成高精度3D雷达、高精度IMU、工业摄像头、RGBD摄像头及高性能计算平台,支持二次开发,并预装建图软件。其便携式设计和多镜头配置使其广泛适用于教育、科研及工业测绘等场景。
朝闻道机器人携手香港科技大学等顶尖学术机构的专家团队,联合研发了GeoScan-360手持激光雷达。该产品的研发成果已在多篇国际知名期刊中发表,GeoScan-360结合了学术研究与实际应用的深度融合,具备卓越的精度与性能。
朝闻道机器人携手香港科技大学等顶尖学术机构的专家团队,联合研发了GeoScan-360手持激光雷达。该产品的研发成果已在多篇国际知名期刊中发表,GeoScan-360结合了学术研究与实际应用的深度融合,具备卓越的精度与性能。
朝闻道机器人携手香港科技大学等顶尖学术机构的专家团队,联合研发了GeoScan-360手持激光雷达。该产品的研发成果已在多篇国际知名期刊中发表,GeoScan-360结合了学术研究与实际应用的深度融合,具备卓越的精度与性能。
规格参数通用尺寸(长*宽*高)35cm*15cm*15cm电源输入12V-24V电池容量72Wh重量 (约) 2kg(含电池)续航时间(约) 2小时存储容量128G产品外壳航空铝供电方式弹夹电池/外部供电主控CPU参数核心数与线程数:4核4线程主频:0.8GHz睿频:最高可达3.4GHz缓存:6MB内存8G存储容量128G激光雷达激光等级Class1/905 nm测量距离0.1m~40m@10%反射率 ,0.1m~70m@80%反射率点云数量及频率200,000点/秒,10 Hz(典型值)视场角水平360°,竖直-7°~52°惯性测量单元ICM40609 -20℃至55℃防护级别IP67深度相机RGB视场角90°×65° RGB分辨率&帧率高达1280×800 30帧/秒深度视场角87°×58°深度分辨率&帧率高达1280×720 90帧/秒最小深度距离0.52米深度精度<2%位于4米工业摄像头数量2分辨率@帧率1280×960 最大@39fps输出像素宽度12bit有效像素120万像元尺寸3.75×3.75um动态范围64dB软件数据格式多种格式可选移动端实时数据解析
规格参数通用尺寸(长*宽*高)35cm*15cm*15cm电源输入12V-24V电池容量72Wh重量 (约) 2kg(含电池)续航时间(约) 2小时存储容量128G产品外壳航空铝供电方式弹夹电池/外部供电主控CPU参数核心数与线程数:4核4线程主频:0.8GHz睿频:最高可达3.4GHz缓存:6MB内存8G存储容量128G激光雷达激光等级Class1/905 nm测量距离0.1m~40m@10%反射率 ,0.1m~70m@80%反射率点云数量及频率200,000点/秒,10 Hz(典型值)视场角水平360°,竖直-7°~52°惯性测量单元ICM40609 -20℃至55℃防护级别IP67深度相机RGB视场角90°×65° RGB分辨率&帧率高达1280×800 30帧/秒深度视场角87°×58°深度分辨率&帧率高达1280×720 90帧/秒最小深度距离0.52米深度精度<2%位于4米工业摄像头数量2分辨率@帧率1280×960 最大@39fps输出像素宽度12bit有效像素120万像元尺寸3.75×3.75um动态范围64dB软件数据格式多种格式可选移动端实时数据解析