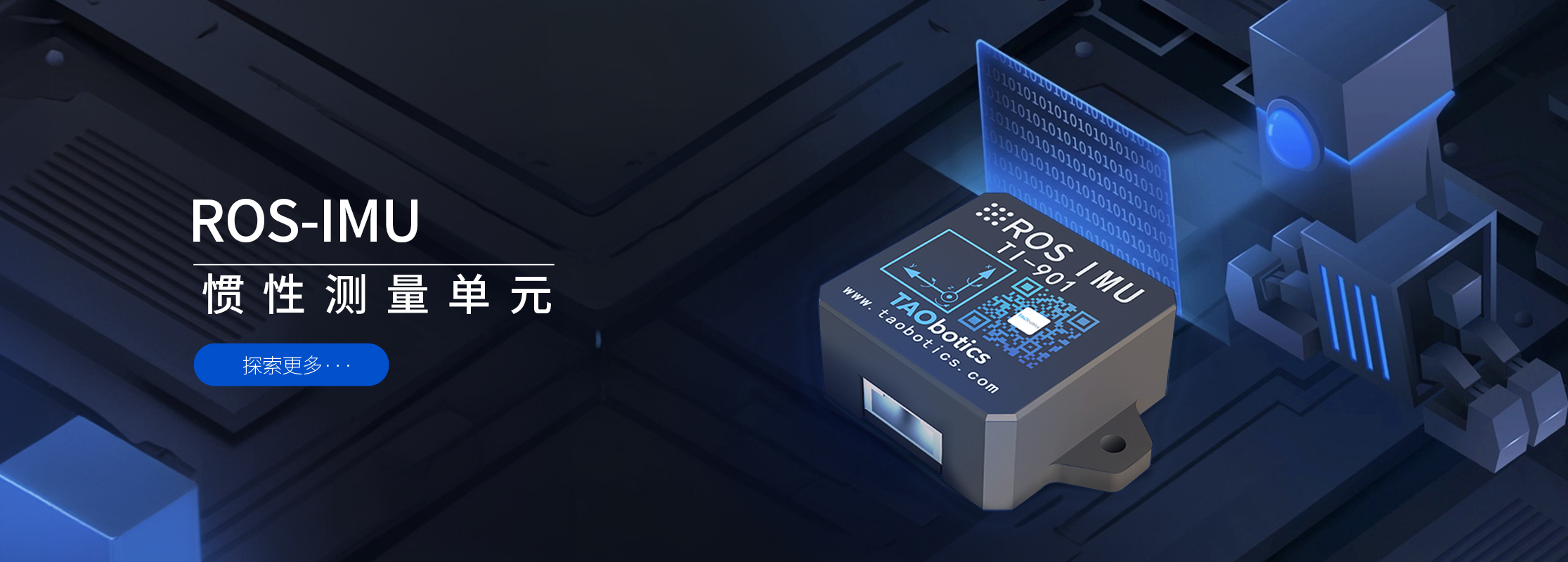
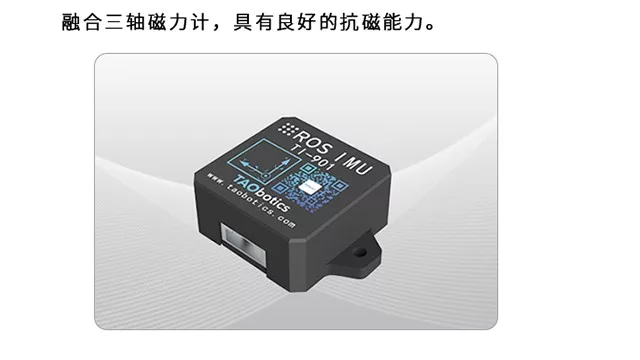
ROS-IMU 惯性测量单元 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 IMU(惯性测量单元)集成陀螺仪、加速度计和磁力计,构建高精度姿态感知系统。自研抗干扰算法确保在连续晃动中,数据与原始基准高度一致,展现了优异的抗干扰能力。 产品特点 数据精准 抗干扰 USB通讯 体积小巧 300Hz数据回传速率 IP65防护的等级 动态角度精度0.5°RMS 静态角度精度0.1°RMS 高性价比 Python ROS 使用教程 高性价比 集成高精度陀螺仪、加速度计和磁力计,确保在复杂环境下稳定表现和精准测量。无论姿态跟踪、位置估算还是运动分析,都能提供高端产品性能,同时价格远低于市场竞品。 USB串口输出 IMU通过USB接口直接连接电脑或其他设备,实现即插即用,无需额外转换器。USB串口输出简化了调试和测试过程,开发者可用常见串口调试工具直接通信,实时监控设备状态。 抗电磁干扰 IMU采用电磁屏蔽技术和内置低噪声传感器设计,能有效抵御外界电磁干扰,确保即使在强电磁环境下也能保持数据的精准无误。 稳定可靠 IMU采用高品质材料和先进工艺,确保在恶劣环境下的稳定性和耐用性。其稳定性能经过严格质量控制和长时间测试,确保在持续工作中保持准确和可靠。 移动机器人研发和制造商,运往全球50+个国家 数据精确 IMU采用了最先进的传感器技术和精密算法,确保了每一次测量都能达到前所未有的精确度。无论是细微的位移、旋转还是加速度变化,都逃不过它的“火眼金睛”。 为ROS而生 丰富的ROS包支持,让您能够轻松上手实现数据的实时采集、处理与可视化,极大地加速了机器人定位、导航、姿态控制及运动规划等核心功能的研发周期。 产品功能 姿态解算 融合建图 应用案例 技术参数 规格加速度计陀螺仪磁力计自由度333ADC分辨频率±8g 4096LSB/g±2000°/s 16.38LSB/(°/s)±1.3Gauss 1090LSB/Gauss带宽256Hz Max256Hz Max–非线性0.6%fs0.3%fs0.1%fs噪声密度0.5mg/√Hz0.01°/s/√Hz–内部采样率1kHz4kHz160Hz Max 参数ROLLPITCHYAW分辨率0.01°0.01°0.01°角度范围±180°±90°0~360°静态启动精度0.1°0.1°0.1°动态精度0.5°0.5°≤1.5°/min重复性<0.5°<0.5°<0.5°位置偏移<0.2°/h<0.2°/h10°/h开机零偏<0.5°<0.5°<0.2° ROS-IMU 惯性测量单元 ¥**** 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
规格加速度计陀螺仪磁力计自由度333ADC分辨频率±8g 4096LSB/g±2000°/s 16.38LSB/(°/s)±1.3Gauss 1090LSB/Gauss带宽256Hz Max256Hz Max–非线性0.6%fs0.3%fs0.1%fs噪声密度0.5mg/√Hz0.01°/s/√Hz–内部采样率1kHz4kHz160Hz Max 参数ROLLPITCHYAW分辨率0.01°0.01°0.01°角度范围±180°±90°0~360°静态启动精度0.1°0.1°0.1°动态精度0.5°0.5°≤1.5°/min重复性<0.5°<0.5°<0.5°位置偏移<0.2°/h<0.2°/h10°/h开机零偏<0.5°<0.5°<0.2°




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
