RS-MUL 空地协同编队系统 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 空地协同编队系统开发平台(RS-MUL) 主要由智能无人车、智能无人机、定位系统、组网通讯系统、多智能体协同控制系统五部分组成。基于定位系统和通讯系统对智能体的位姿数据实时获取和传输,并通过预设算法,实现无人车和无人机的编队和协同控制。 产品特点 协同作业 多智能体 集群编队 安全可靠 多种功能 支持二次开发 丰富接口 代码开源 C++ Python ROS 使用教程 超还原仿真系统 系统使用先进仿真技术创建高度逼真的场景,允许用户在安全、低成本的环境中测试和验证算法。用户可以操作机器人、观察其行为并调整策略,验证后再部署到实际系统中,降低测试风险和成本。 多智能体异构协同 系统支持不同智能体(如无人机和无人车)之间的协同作业。无人机进行空中侦察,无人车执行地面任务,协同作业提升了任务复杂度和整体效率。 超强算力 Jetson系列主机不仅保证了强大的算力支持,还为用户提供了高效的数据处理和智能决策能力。 代码开源 平台代码全开源,用户可自由访问、修改和扩展平台功能。 设备可拓展 平台支持轻松增加更多设备,用户可通过简单操作实现扩展,无需复杂配置或编程。这种设计简化了系统扩展过程,提高了操作灵活性和效率。 移动机器人研发和制造商,运往全球50+个国家 多智能体协同 系统支持无人机和无人车等智能体的协同作业。这些智能体通过相互配合执行空中侦察、地面运输等复杂任务,提高整体作业效率和效果。 多定位模组可选 空地协同编队系统特别为用户提供了定位设备不同方案的定位系统,允许用户根据自身需求自由选择定位硬件设备,从而实现个性化定制选择。 产品功能 队型变换 仿真 物体识别 三车编队 实时控制 一键运行脚本 ego_planner仿真 gazebo_fast_planner仿真 gazebo_fuxi_planner仿真 rviz_fuxi_planner仿真 无人机钻圈 室外飞行 应用案例 技术参数 规格标配动捕版高配版无人车Gemini-O标配版*3Thunder标配版*1无人机Q300标配版*3Q300高配版*1地面站平台CPUintel酷睿i5处理器内存8GB存储容量128GB屏幕分辨率1920×1080屏幕尺寸13英寸组网路由器网口千兆网口/WiFi标准支持Wi-Fi6/WAN接口千兆网口/IP协议支持IPv6/Mesh组网模块工作频率//2.4GHz最大带宽//30M最远传输距离//3000m通信延迟//40msUWB定位套装模块数量基站4个、6个标签和1个控制端//最大通信距离30m//定位精度典型±10cm,一般遮挡±30cm//动捕定位套装镜头数量/12/摄像头像素/130万/图像分辨率/1280×1024/帧率/240fps/精度/±0.2mm/观测距离/11m/无人机平台定位套装(RTK)刷新率//20Hz定位精度//0.01m+1ppm CEP收敛时间//<60s移动平台定位套装(RTK)支持的定位系统//BDS/GPS/GLONASS/Galileo/QZSS等更新频率//20Hz室内飞行防护框架铝合金框架与尼龙防护网1套尺寸为600cmx600cmx270cm/光流定位垫1套单片尺寸为60cmx60cm,共计36个/ RS-MUL 空地协同编队系统 ¥**** 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
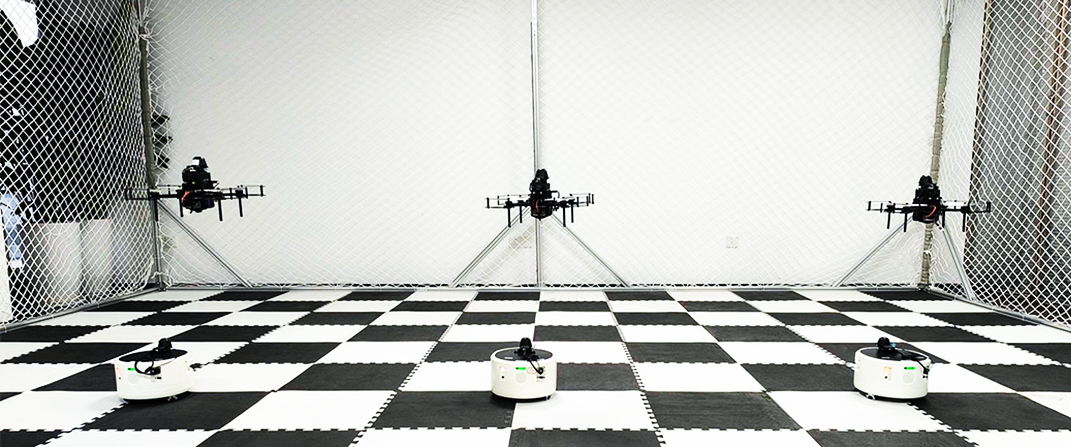
空地协同编队系统开发平台(RS-MUL) 主要由智能无人车、智能无人机、定位系统、组网通讯系统、多智能体协同控制系统五部分组成。基于定位系统和通讯系统对智能体的位姿数据实时获取和传输,并通过预设算法,实现无人车和无人机的编队和协同控制。
规格标配动捕版高配版无人车Gemini-O标配版*3Thunder标配版*1无人机Q300标配版*3Q300高配版*1地面站平台CPUintel酷睿i5处理器内存8GB存储容量128GB屏幕分辨率1920×1080屏幕尺寸13英寸组网路由器网口千兆网口/WiFi标准支持Wi-Fi6/WAN接口千兆网口/IP协议支持IPv6/Mesh组网模块工作频率//2.4GHz最大带宽//30M最远传输距离//3000m通信延迟//40msUWB定位套装模块数量基站4个、6个标签和1个控制端//最大通信距离30m//定位精度典型±10cm,一般遮挡±30cm//动捕定位套装镜头数量/12/摄像头像素/130万/图像分辨率/1280×1024/帧率/240fps/精度/±0.2mm/观测距离/11m/无人机平台定位套装(RTK)刷新率//20Hz定位精度//0.01m+1ppm CEP收敛时间//<60s移动平台定位套装(RTK)支持的定位系统//BDS/GPS/GLONASS/Galileo/QZSS等更新频率//20Hz室内飞行防护框架铝合金框架与尼龙防护网1套尺寸为600cmx600cmx270cm/光流定位垫1套单片尺寸为60cmx60cm,共计36个/

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
