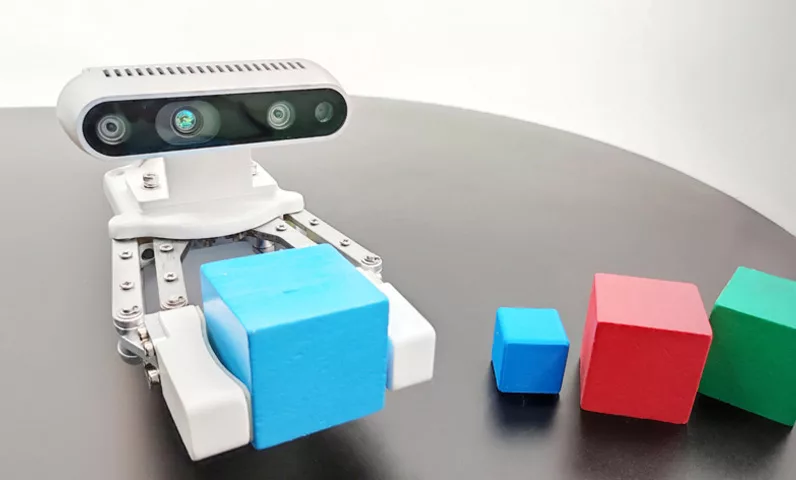
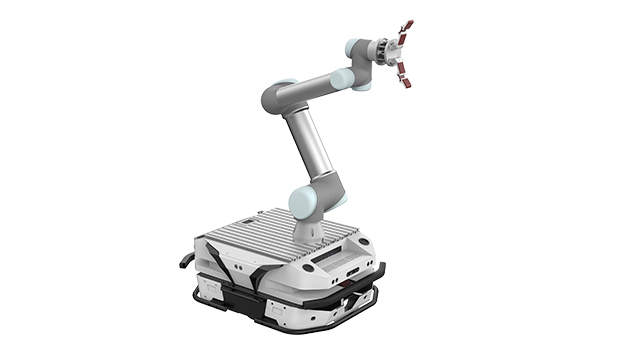
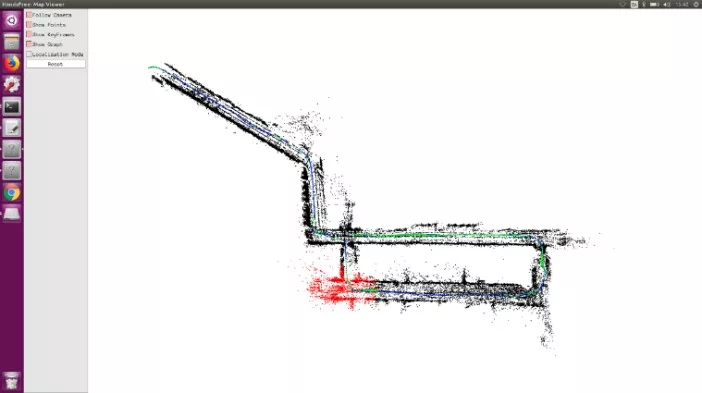
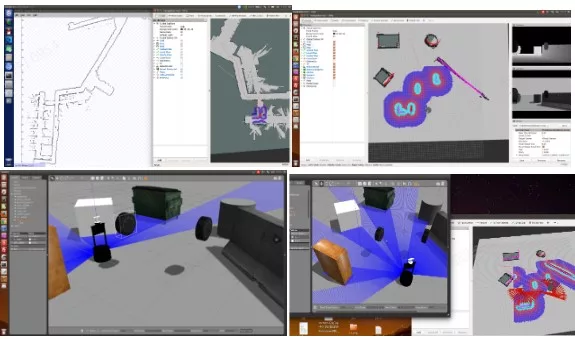
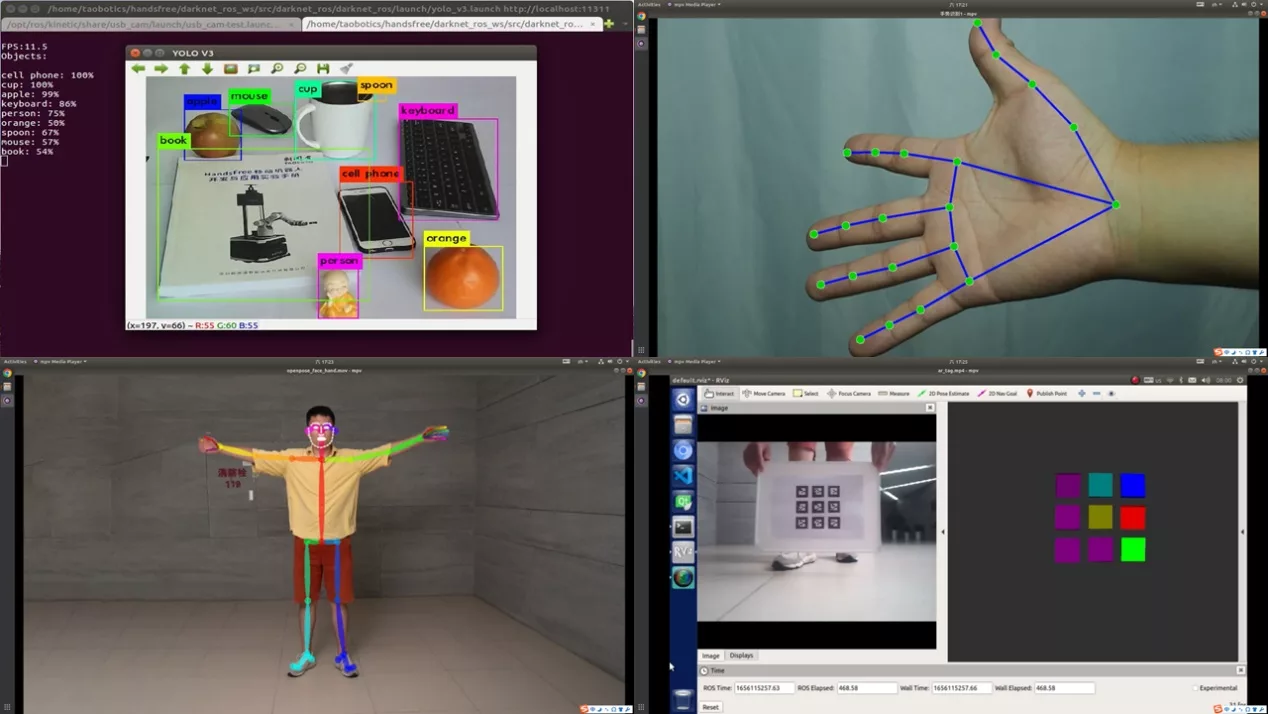
RS-AGR 智慧农业采摘机器人平台 产品介绍 应用案例 技术参数 使用手册 Menu 产品介绍 应用案例 技术参数 使用手册 前往淘宝 产品简介 智慧农业采摘机器人平台包括移动平台、机械臂、执行器、视觉系统和控制系统。它支持自主导航、智能避障、果蔬识别、动态误差校准及作业量控制,能进行无人路径规划和定点停靠。 产品特点 支持机械臂 视觉抓取 算力强劲 自主导航 深度立体相机 激光雷达定位 二次开发 代码开源 C++ Python ROS 使用教程 实时感知避障 搭载多种先进传感器,通过融合技术精准感知环境。内部系统利用先进算法处理数据,制定最优避障策略,实现实时障碍物识别和安全路径规划,有效降低碰撞风险。 手眼协同 配备深度摄像头和先进的图像处理算法,实现快速的目标物体识别和定位。结合精密机械臂和灵活机械爪,实现了对目标物体的灵活操作和稳定抓取。 自动辨别果蔬 集成图像识别与人工智能技术,机器人实时捕捉并分析果蔬图像。利用深度学习算法,快速准确地识别果蔬种类,实现高效分类和处理。 机械臂运动规划 搭载先进机械臂规划系统,提供高精度和高效率。系统利用复杂算法和高速计算精细规划每个动作,自动调整路径和速度,适应不同环境和任务需求,确保精准操作。 移动机器人研发和制造商,运往全球50+个国家 丰富搭配方案 平台集成六款智能无人车和多款机械臂,支持根据研究需求自由组合,模拟复杂农业环境。为精准农业、作物监测、病虫害识别等研究提供实验支持。 模块化设计 智能无人车、协作机械臂及其他农业智能设备可作为独立模块选择和组合。模块化设计提供了前所未有的灵活性,简化了操作和维护流程。 产品功能 水果识别 机械臂采摘 SLAM环境建图 自主定位导航Python编程实践 ORB_SLAM实践仿真实践 机器学习 丰富教程 应用案例 技术参数 标配 中配 高配 规格标配中配高配无人车智能差速AGV机器人Turtle高配版 x 1智能差速四驱无人车Thunder高配版 x 1智能差速四驱无人车Thunder高配版 x 1机械臂机械臂型号智能协作机械臂套件V6_PLUS Arm智能协作机械臂套件xArm6智能协作机械臂套件UR5自由度6个6个6个重量12.8kg12.2kg20.6 kg 末端负载1500g最大5kg5 kg机械臂臂展660mm700mm/有效工作半径600mm700mm850mm重复定位精度0.1mm±0.1mm±0.03mm末端最大速度600mm/s1m/s 关节最大速度1、2轴90º/s,3、4轴120º/s,5、6轴300º/s180º/s180°/s关节行程1轴[-150º,+150º],2轴[-65º,110º],3轴[-165º,+165º],4轴[+25º,+185º],5轴[-270º,270º],6轴[-30º,+200º]/基座[-360º,+360º],肩部[-360º,360º],肘部[-360º,+360º],腕部1[-360º,+360º],腕部2[-360º,360º],腕部3[-360º,+360º]电源输入24V/12A//通讯接口USB通讯接口TCP-IP/Enthernet/ RS-AGR 智慧农业采摘机器人平台 ¥**** 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。
规格标配中配高配无人车智能差速AGV机器人Turtle高配版 x 1智能差速四驱无人车Thunder高配版 x 1智能差速四驱无人车Thunder高配版 x 1机械臂机械臂型号智能协作机械臂套件V6_PLUS Arm智能协作机械臂套件xArm6智能协作机械臂套件UR5自由度6个6个6个重量12.8kg12.2kg20.6 kg 末端负载1500g最大5kg5 kg机械臂臂展660mm700mm/有效工作半径600mm700mm850mm重复定位精度0.1mm±0.1mm±0.03mm末端最大速度600mm/s1m/s 关节最大速度1、2轴90º/s,3、4轴120º/s,5、6轴300º/s180º/s180°/s关节行程1轴[-150º,+150º],2轴[-65º,110º],3轴[-165º,+165º],4轴[+25º,+185º],5轴[-270º,270º],6轴[-30º,+200º]/基座[-360º,+360º],肩部[-360º,360º],肘部[-360º,+360º],腕部1[-360º,+360º],腕部2[-360º,360º],腕部3[-360º,+360º]电源输入24V/12A//通讯接口USB通讯接口TCP-IP/Enthernet/



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



